 Minotauromaquia
Minotauromaquia
Has construido un clawbot pero no hace nada porque no lo has programado. Esta página lo guiará paso a paso a través de la programación de su clawbot.
Pasos
- 1
 Obtenga el entorno de programación. Puede descargar RobotC gratis aquí: http://www.robotc.net/download/vexrobotics/
Obtenga el entorno de programación. Puede descargar RobotC gratis aquí: http://www.robotc.net/download/vexrobotics/ -
 2 Crea un nuevo bit de código. Ir a Archivo / Nuevo / Nuevo Archivo. También puede usar una 'Plantilla de competencia' si planea usar este código en una competencia. Pero si solo está probando su robot, 'Nuevo archivo' funciona.
2 Crea un nuevo bit de código. Ir a Archivo / Nuevo / Nuevo Archivo. También puede usar una 'Plantilla de competencia' si planea usar este código en una competencia. Pero si solo está probando su robot, 'Nuevo archivo' funciona. -
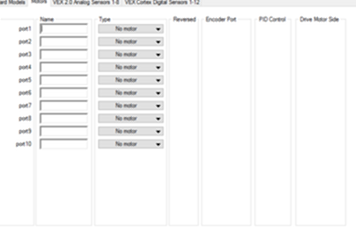 3 Configure los motores. Vaya a la página de configuración de motores y sensores (robot / motores y sensores). Cuando aparezca el recuadro, ingrese el nombre de su motor (cualquier cosa que desee, pero quédese con cosas como la parte delantera derecha y levante) en el número de puerto correspondiente. Use la lista desplegable a la derecha para seleccionar el tipo de motor que está usando y verifique si lo necesita o no. Puede usar la prueba y el error para averiguar si es necesario invertirlo o no.
3 Configure los motores. Vaya a la página de configuración de motores y sensores (robot / motores y sensores). Cuando aparezca el recuadro, ingrese el nombre de su motor (cualquier cosa que desee, pero quédese con cosas como la parte delantera derecha y levante) en el número de puerto correspondiente. Use la lista desplegable a la derecha para seleccionar el tipo de motor que está usando y verifique si lo necesita o no. Puede usar la prueba y el error para averiguar si es necesario invertirlo o no. - 4 Codifica el ciclo while. Deberá asegurarse de que todo el código para controlar sus motores esté dentro de algún tipo de ciclo while infinito. Esto hará que su programa funcione sin problemas, ya que constantemente verifica si el controlador solicita un motor para moverse.
tarea principal() mientras(1==1)
- 5 Codifica las ruedas. Si tiene cuatro motores para sus ruedas, puede configurar sus motores dos en cada lado. El código se ve así:
motor[leftF] = vexRT[Ch3]; motor[leftB] = vexRT[Ch3]; motor[derechoF] = vexRT[Ch2]; motor[rightB] = vexRT[Ch2];
Esto es tomar un motor específico y asignarlo a un canal; en este caso, 3 o 2. Estos son el eje y en los joysticks. El código toma automáticamente la posición del joystick y le da a las ruedas las rpm apropiadas (rotaciones por minuto). - 6 Codifica el ascensor. Esto elevará y bajará el brazo sobre el que está tu garra.
Si(vexRT[Btn5U]==1) motor[Ascensor]=127; más Si(vexRT[Btn5D]==1) motor[Ascensor]=-127; más motor[Ascensor]=0;
Es decir: si Btn5U se mantiene presionada, el motor de elevación gira hacia delante (en el sentido de las agujas del reloj) a la velocidad de 127 rpm. Entonces, si eso no está sucediendo, se presiona Btn5D, si eso es cierto, entonces gire el motor hacia atrás (en sentido antihorario). Si nada de eso está sucediendo, no encienda el motor en absoluto. - 7 Agrega el código de garra.
Si(vexRT[Btn5U]==1) motor[Ascensor]=127; más Si(vexRT[Btn5D]==1) motor[Ascensor]=-127; más motor[Ascensor]=0;
Este código se parece mucho al código de elevación pero, en lugar de Btn5U y Btn5D, usa Btn6U y Btn6D. Esto significa que utiliza un conjunto diferente de botones en su controlador para la elevación y la garra. La otra diferencia es que este pequeño código activa el motor 'garra' en lugar de la 'elevación' del motor. -
 8 Pruebe y adapte su nuevo código. Una vez que haya completado su código, compile y descárguelo en su clawbot (Windows - F5).
8 Pruebe y adapte su nuevo código. Una vez que haya completado su código, compile y descárguelo en su clawbot (Windows - F5). - Puede cambiar los botones que activan los motores y cambiar las rpm de los motores. El más rápido que los motores estándar 393 pueden ir es 127rpm.
- 9 Siéntase libre de jugar con el código y encontrar lo que funciona para usted. Hay otras formas de hacer que suceda lo mismo utilizando robotC pero lo anterior es la edición y comprensión más fáciles de realizar.
 Obtenga el entorno de programación. Puede descargar RobotC gratis aquí: http://www.robotc.net/download/vexrobotics/
Obtenga el entorno de programación. Puede descargar RobotC gratis aquí: http://www.robotc.net/download/vexrobotics/  2 Crea un nuevo bit de código. Ir a Archivo / Nuevo / Nuevo Archivo. También puede usar una 'Plantilla de competencia' si planea usar este código en una competencia. Pero si solo está probando su robot, 'Nuevo archivo' funciona.
2 Crea un nuevo bit de código. Ir a Archivo / Nuevo / Nuevo Archivo. También puede usar una 'Plantilla de competencia' si planea usar este código en una competencia. Pero si solo está probando su robot, 'Nuevo archivo' funciona.  3 Configure los motores. Vaya a la página de configuración de motores y sensores (robot / motores y sensores). Cuando aparezca el recuadro, ingrese el nombre de su motor (cualquier cosa que desee, pero quédese con cosas como la parte delantera derecha y levante) en el número de puerto correspondiente. Use la lista desplegable a la derecha para seleccionar el tipo de motor que está usando y verifique si lo necesita o no. Puede usar la prueba y el error para averiguar si es necesario invertirlo o no.
3 Configure los motores. Vaya a la página de configuración de motores y sensores (robot / motores y sensores). Cuando aparezca el recuadro, ingrese el nombre de su motor (cualquier cosa que desee, pero quédese con cosas como la parte delantera derecha y levante) en el número de puerto correspondiente. Use la lista desplegable a la derecha para seleccionar el tipo de motor que está usando y verifique si lo necesita o no. Puede usar la prueba y el error para averiguar si es necesario invertirlo o no.  8 Pruebe y adapte su nuevo código. Una vez que haya completado su código, compile y descárguelo en su clawbot (Windows - F5).
8 Pruebe y adapte su nuevo código. Una vez que haya completado su código, compile y descárguelo en su clawbot (Windows - F5). Facebook
Twitter
Google+